- IMPORTANT!
- The MOT evaluation code is not any longer maintained. Please visit the new official python evaluation code.
- Python 3.6.9
- MATLAB (> R2014b)
- C/C++ compiler
- matlab python engine (https://www.mathworks.com/help/matlab/matlab_external/get-started-with-matlab-engine-for-python.html)
- install requirements.txt
- Note: A compatible Python implementation is available at: https://github.com/cheind/py-motmetrics
- Compile the matlab evaluation code
matlab matlab_devkit/compile.m
- Run
python MOT/evalMOT.py
To run the evaluation for your method please adjust the file MOT/evalMOT.py using the following arguments:
benchmark_name: Name of the benchmark, e.g. MOT17
gt_dir: Directory containing ground truth files in <gt_dir>/<sequence>/gt/gt.txt
res_dir: The folder containing the tracking results. Each one should be saved in a separate .txt file with the name of the respective sequence (see ./res/data)
save_pkl: path to output directory for final results (pickle) (default: False)
eval_mode: Mode of evaluation out of ["train", "test", "all"] (default : "train")
eval.run(
benchmark_name = benchmark_name,
gt_dir = gt_dir,
res_dir = res_dir,
eval_mode = eval_mode
)
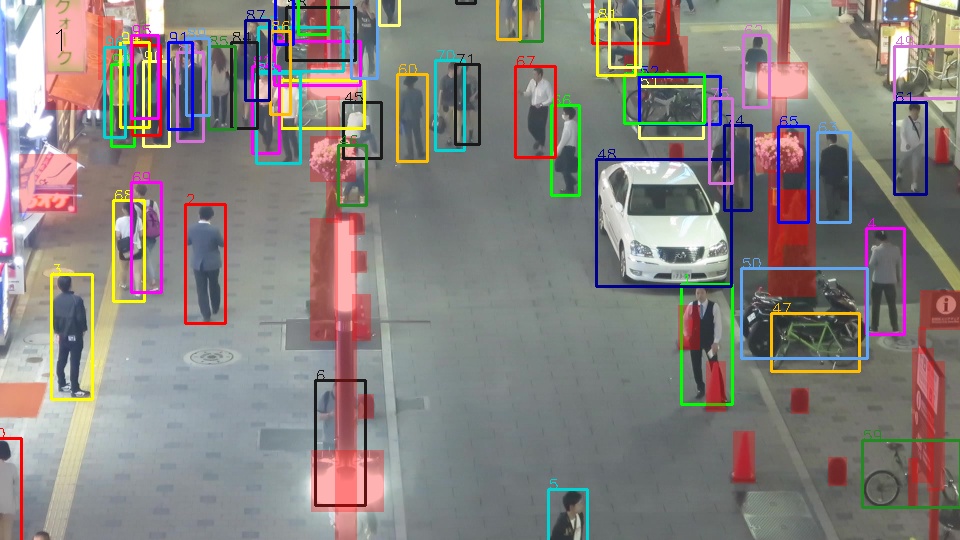
To visualize your results or the annotations run
python MOT/MOTVisualization.py
Inside the script adjust the following values for the MOTVisualizer class:
seqName: Name of the sequence
FilePath: Data file
image_dir: Directory containing images
mode: Video mode. Options: None for method results, raw for data video only, and gt for annotations
output_dir: Directory for created video and thumbnail images
Additionally, adjust the following values for the generateVideo function:
displayTime: If true, display frame number (default false)
displayName: Name of the method
showOccluder: If true, show occluder of gt data
fps: Frame rate
visualizer = MOTVisualizer(seqName, FilePath, image_dir, mode, output_dir )
visualizer.generateVideo(displayTime, displayName, showOccluder, fps )
The file format should be the same as the ground truth file, which is a CSV text-file containing one object instance per line. Each line must contain 10 values:
<frame>,
<id>,
<bb_left>,
<bb_top>,
<bb_width>,
<bb_height>,
<conf>,
<x>,
<y>,
<z>
The world coordinates x,y,z
are ignored for the 2D challenge and can be filled with -1.
Similarly, the bounding boxes are ignored for the 3D challenge.
However, each line is still required to contain 10 values.
All frame numbers, target IDs and bounding boxes are 1-based. Here is an example:
1, 3, 794.27, 247.59, 71.245, 174.88, -1, -1, -1, -1 1, 6, 1648.1, 119.61, 66.504, 163.24, -1, -1, -1, -1 1, 8, 875.49, 399.98, 95.303, 233.93, -1, -1, -1, -1 ...
The repository also allows you to include your own datasets and evaluate your method on your own challenge <YourChallenge>. To do so, follow these two steps:
1. Ground truth data preparation
Prepare your sequences in directory ~/data/<YourChallenge> following this structure:
.
|—— <SeqName01>
|—— gt
|—— gt.txt
|—— det
|—— det.txt
|—— img1
|—— 000001.jpg
|—— 000002.jpg
|—— ….
|—— <SeqName02>
|—— ……
|—— <SeqName03>
|—— …...
If you have different image sources for the same sequence or do not provide public detections you can adjust the structure accordingly.
2. Sequence file
Create text files containing the sequence names; <YourChallenge>-train.txt, <YourChallenge>-test.txt, <YourChallenge>-test.txt inside ~/seqmaps, e.g.:
<YourChallenge>-all.txt
name
<seqName1>
<seqName2>
<seqName3>
<YourChallenge>-train.txt
name
<seqName1>
<seqName2>
<YourChallenge>-test.txt
name
<seqName3>
To run the evaluation for your method adjust the file MOT/evalMOT.py and set benchmark_name = <YourChallenge> and eval_mode: Mode of evaluation out of ["train", "test", "all"] (default : "train")
If you work with the code and the benchmark, please cite:
MOTChallenge
@article{dendorfer2020motchallenge,
title={MOTChallenge: A Benchmark for Single-camera Multiple Target Tracking},
author={Dendorfer, Patrick and Osep, Aljosa and Milan, Anton and Schindler, Konrad and Cremers, Daniel and Reid, Ian and Roth, Stefan and Leal-Taix{\'e}, Laura},
journal={International Journal of Computer Vision},
pages={1--37},
year={2020},
publisher={Springer}
}
MOT 15
@article{MOTChallenge2015,
title = {{MOTC}hallenge 2015: {T}owards a Benchmark for Multi-Target Tracking},
shorttitle = {MOTChallenge 2015},
url = {http://arxiv.org/abs/1504.01942},
journal = {arXiv:1504.01942 [cs]},
author = {Leal-Taix\'{e}, L. and Milan, A. and Reid, I. and Roth, S. and Schindler, K.},
month = apr,
year = {2015},
note = {arXiv: 1504.01942},
keywords = {Computer Science - Computer Vision and Pattern Recognition}
}
MOT 16, MOT 17
@article{MOT16,
title = {{MOT}16: {A} Benchmark for Multi-Object Tracking},
shorttitle = {MOT16},
url = {http://arxiv.org/abs/1603.00831},
journal = {arXiv:1603.00831 [cs]},
author = {Milan, A. and Leal-Taix\'{e}, L. and Reid, I. and Roth, S. and Schindler, K.},
month = mar,
year = {2016},
note = {arXiv: 1603.00831},
keywords = {Computer Science - Computer Vision and Pattern Recognition}
}
MOT 20
@article{MOTChallenge20,
title={MOT20: A benchmark for multi object tracking in crowded scenes},
shorttitle = {MOT20},
url = {http://arxiv.org/abs/2003.09003},
journal = {arXiv:2003.09003[cs]},
author = {Dendorfer, P. and Rezatofighi, H. and Milan, A. and Shi, J. and Cremers, D. and Reid, I. and Roth, S. and Schindler, K. and Leal-Taix\'{e}, L. },
month = mar,
year = {2020},
note = {arXiv: 2003.09003},
keywords = {Computer Science - Computer Vision and Pattern Recognition}
}
If you find a problem in the code, please open an issue.
For general questions, please contact Patrick Dendorfer (patrick.dendorfer@tum.de) or Aljosa Osep (aljosa.osep@tum.de)