Kaarevuussäde
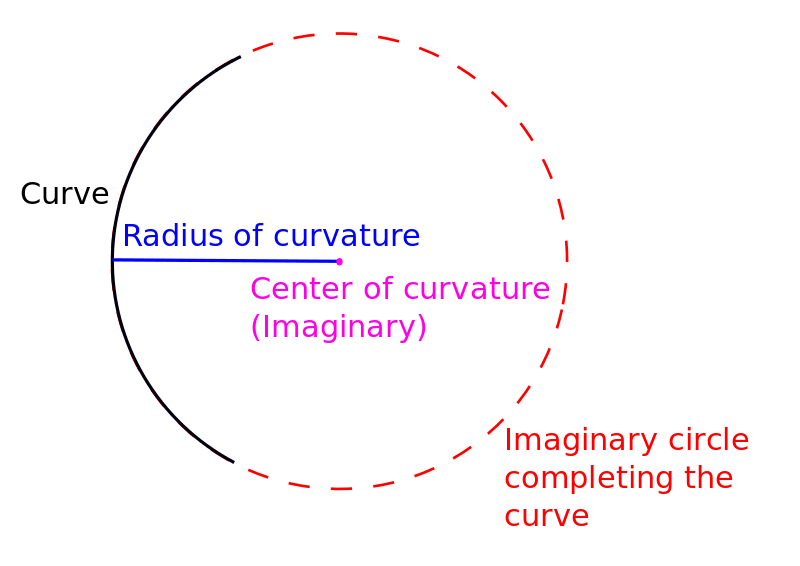
Kaarevuussäde (R) on differentiaaligeometriassa kaarevuuden käänteisarvo. Käyrän kaarevuussäde sen kussakin pisteessä on sen ympyrän säde, joka tämän pisteen läheisyydessä tarkimmin yhtyy käyrään. Tämän ympyrän keskipistettä sanotaan käyrän kaarevuuskeskipisteeksi. Pinnan kaarevuussäde on sen ympyrän säde, joka parhaiten vastaa pinnan normaalileikkausta tai sellaisten yhdistelmää.[1][2][3]
Määritelmiä
[muokkaa | muokkaa wikitekstiä]Avaruuskäyrän kaarevuussäde on sen kaarevuusvektorin pituus.
Tasokäyrän kaarevussäde R on lausekkeen
itseisarvo, missä s on kaaren pituus mitattuna jostakin käyrältä valitusta kiinteästä pisteestä, tangenttikulma ja käyrän kaarevuus.[3]
Kaavoja
[muokkaa | muokkaa wikitekstiä]Kahdessa ulottuvuudessa
[muokkaa | muokkaa wikitekstiä]Jos käyrä on annettu karteesisessa koordinaatistossa muodossa , toisin sanoen jos se on jonkin funktion kuvaaja, ja jos lisäksi tällä funktiolla on ainakin ensimmäisen ja toisen kertaluvun derivaatat, käyrän kaarevuussäde on
missä ja tarkoittaa z:n itseisarvoa.
Jos käyrä on annettu parametrimuodossa funktiolla x(t) ja y(t), sen kaarevuussäde on
missäe ja
Heuristisesti tämä voidaan tulkita seuraavasti:[2]
missä
n ulottuvuudessa
[muokkaa | muokkaa wikitekstiä]Jos on parametroitu käyrä avaruudessa , käyrän kaarevuussäde, , käyrän kussakin pisteessä saadaan kaavasta[3]
Siinä erikoistapauksessa, että f(t) on funktio , sen kuvaajan kaarevuussäde on
Kaavan johto
[muokkaa | muokkaa wikitekstiä]Olkoon kuten edellä ja kiinnitetään t Tehtävänä on etsiä sellaisen parametroidun ympyrän säde, jonka nollas, ensimmäinen ja toinen derivaatta saavat saman arvon parametrin arvolla t. Selvästikään säde ei riipu paikasta , ainoastaan sen ensimmäisestä ja toisesta derivaatasta ja . Jos parametrin t tulkitaan tarkoittavan aikaa ja pisteen kuvitellaan liikkuvan käyrää pitkin, näistä edellinen vastaa sen nopeutta ja jälkimmäinen kiihtyvyyttä. On vain kolme skalaaria, jotka voidaan pistetuloina muodostaa kahdesta Kahdesta vektorista, v ja w, nimittäin , ja . Niinpä kaarevuussäteen on oltava kolmen skalaarin, , ja funktio.[3]
Yleinen yhtälö parametroidulle ympyrälle avaruudessa on
missä on ympyrän keskipiste, joka kuitenkin on merkityksetön, sillä se häviää derivoitaessa, ja ovat kaksi toisiinsa nähden kohtisuoraa vektoria, joiden kummankin pituus on , toisin sanoen , ja on mielivaltainen t:ssä kahteen kertaan derivoituva funktio.
Ilmenee, että g:n merkitykselliset derivaatat ovat
Jos nämä g:n derivaatat asetetaan yhtä suuriksi kuin :n derivaatat t:ssä, saadaan:
Näissä kolmessa yhtälössä on kolme tuntematonta, , ja . Ne voidaan ratkaista :n avulla, jolloin kaarevuussäteelle saadaan kaava
tai jos luettavuuden parantamiseksi parametri t jätetään pois:
Esimerkkejä
[muokkaa | muokkaa wikitekstiä]Puoliympyrät ja ympyrät
[muokkaa | muokkaa wikitekstiä]Ylemmässä puolitasossa a-säteisen puoliympyrälle, jolla , saadaan:

Alemmassa puolitasossa a olevalle puoliympyrälle saadaan
Ympyrän kaarevuussäde on sama kuin sen säde.
Ellipsi
[muokkaa | muokkaa wikitekstiä]Tarkastellaan ellipsiä, jonka isoakselin pituus on 2a ja pikkuakselin 2b. Ellipsin kaarevuussäde saa suurimman arvonsa, sen ja pikkuakselin leikkauspisteessä, pienimmän arvonsa, taas ellipsin ja sen isoakselin leikkauspisteissä. Näitä pisteitä sanotaan ellipsin kärjiksi.
Kun ellipsi esitetään parametrimuodossa, , missä 2a ja 2b ovat sen iso- ja pikkuakselien pituudet, sen kaarevuus kussakin pisteessä on[4]
.
Jos parametrina käytetään tangenttikulmaa ,
saadaan ellipsin kaarevuussäteelle kussakin pisteessä lauseke
missä e on ellipsin eksentrisyys,
Sovelluksia
[muokkaa | muokkaa wikitekstiä]- Differnetiaaligeometriassa tasokäyrän kaarevuuden ja kaaren pituuden välisen yhteyen osoittaa kunkin käyrän Cesàron yhtälö.
- Maan kaarevuussäde määritetään astemittauksilla.
- Kaarevuussädettä käytetään myös palkin taipumista kuvaavissa yhtälöissä.
- Optiikassa linssin ja pallopeilin kaarevuussäteellä on suuri merkitys. Niinpä pallopeilin polttoväli on puolet sen kaarevuussäteestä. Linssin polttoväli taas riippuu sen kaarevuussäteestä, paksuudesta ja materiaalin taitekertoimesta linssintekijän yhtälön osoittamalla tavalla.
- Ohuiden kalvojen teknologiat
- Tulostettava elektroniikka
- Rautateiden kaarteille määritetään pienin sallittu kaarevuussäde, josta riippuu, kuinka nopeasti junat voivat radalla turvallisesti kulkea.
- Atomivoimamikroskooppin erotuskyky riippuu sen neulan kärjen kaarevuussäteestä.
Puolijohderakenteiden jännitys
[muokkaa | muokkaa wikitekstiä]Puolijohderakenteissa esiintyvä jännitys, joka voi saada ohuet kalvot jopa höyrystymään, johtuu yleensä valmistuksen aikaisesta lämpölaajenemisesta. Lämpölaajenemista ja siitä aiheutuvaa jännitystä esiintyy, koska kalvot yleensä asennetaan paikoilleen huoneenlämpöä korkeammassa lämpötilassa. Sen jäähtyessä huoneenlämpöön syntyy lämpöjännitys, koska kalvomateriaalilla ja sillä materiaalilla (alusrakenteella), johon se kiinnitetään, on eri suuri lämpölaajenemiskerroin.[5]
Sisäinen jännitys aiheutuu mikrorakenteesta, joka syntyy kalvossa, kun sen atomit sitoutuvat alusrakenteen atomeihin. Lisäksi syntyy vetojännistystä, jonka aiheuttavat kalvon atomirakenteessa olevat aukot, sillä atomien väliset sidosvoimat vaikuttavat tällaisten pienten aukkojenkin yli.
Puolijohdekalvon jännitys saa aikaan nurjahduksia. Jännittyneen rakenteen kaarevuussäteen ja rakenteen jännityksen välillä on yhteys, jota kuvaa eräs Stoneyn kaavan muunnelma.[6] Jännittyneen rakenteen tarkka muoto ja myös sen kaarevuussäde voidaan mitata optisilla skannausmenetelmillä. Nykyaikaiset skannauslaitteet voivat mitata alusrakenteen epätasaisuudet hyvin tasaisesti ja samalla myös sen epätasaisten kohtien kaarevuussäteet 0,1 prosentin tarkkuudella, kun kaarevuussäde on 90 metriä tai enemmänkin.[7]

Lähteet
[muokkaa | muokkaa wikitekstiä]- ↑ Radius of curvature Wolfram MathWorld. Eric Weisstien. Viitattu 24.11.2023.
- ↑ a b Hari Kishan: Differential Calculus, s. 210. Atlantic Publishers & Dist, 2007. ISBN 9788126908202 Teoksen verkkoversio.
- ↑ a b c d Clyde E. Love; Earl D. Rainville: Differential and Integral Calculus. (6. paimos) MacMillan, 1962.
- ↑ Ellipse Wolfram MathWorld. Eric W. Weisstein. Viitattu 24.11.2023.
- ↑ Grégor Abadias ym.: Stress in thin films and coatings: Current status, challenges, and prospects. Journal of Vacuun Science & Technology A, Maaliskuu 2008, 36. vsk, nro 2. Artikkelin verkkoversio.
- ↑ The Stoney Equation – the Thin Coating Limit LibreTexts Engineering. Viitattu 24.11.2023.
- ↑ Peter Walecki: [zebraoptical.com/ModelX.html Model X] Zebraoptical.com. Viitattu 24.11.2023.